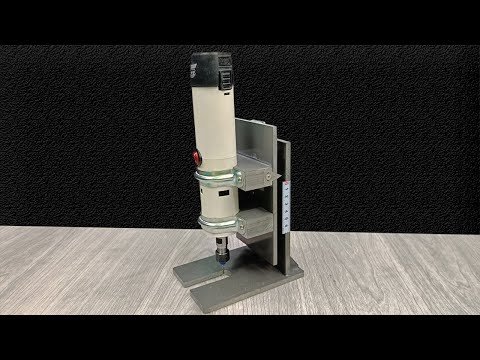
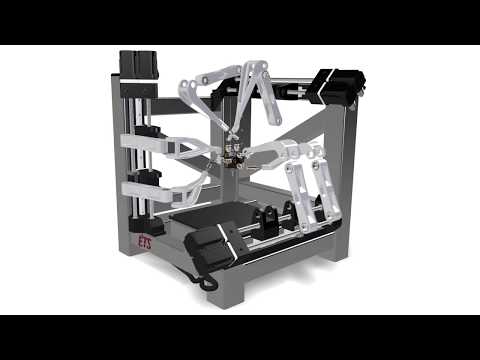
The Hexapteron is probably the only 6-DOF six-legged parallel robot with trivial inverse and direct kinematics. The mechanism was first proposed in http://etsmtl.ca/Professeurs/ibonev/d.... The prototype shown in this video is currently being assembled. It will be equipped with a high-speed spindle (60,000 RPM) and used for five-axis machining.